СУДОРЕМОНТ ОТ А ДО Я.
В своем блоге буду описывать основы технологии судоремонта, методы дефектоскопии, восстановления и упрочнения деталей, виды и методы ремонта судов и механизмов.Будет приведена технологическая документация на ремонт и изготовление деталей.
Оглавление
- Магазин
- Частные объявления
- Книги о судоремонте.
- Программное обеспечение
- Основные направления развития технологии судоремон.
Образование лопасти и ее элементы.
Лопасть образуется из винтовой поверхности, рассеченной двумя соосными цилиндрами: по диаметру винта и ступицы. Ее можно дополнительно пересечь или двумя плоскостями, перпендикулярными оси, или двумя плоскостями, проходящими через ось и расположенными под углом друг к другу. У полученного участка ВП скругляются углы, в результате чего и получается лопасть. Чтобы получить несколько лопастей винта, необходимо в качестве образующей взять крест (4 лопасти) или другую соответствующую фигуру, которая образует многозаходную винтовую поверхность.
На чертежах обычные цельнолитые винты вычерчивают в двух проекциях, на которых показывают одну лопасть и ступицу. Проекция на плоскость, перпендикулярную оси винта, называется нормальной, а на плоскость, параллельную оси винта, – боковой. Третью проекцию – горизонтальную – используют для винтов регулируемого шага или со съемными лопастями.
Поверхность лопасти, обращенная назад, называется нагнетательной (нагнетающей), а поверхность, обращенная к корпусу, – засасывающей. Когда мы говорили о типах винтовой поверхности, имелась в виду нагнетательная поверхность, а засасывающая получается путем добавления толщин к ней.
Часть лопасти, прилегающая к ступице, называется корнем, а противоположная – краем (концом) лопасти.
Передняя кромка лопасти (при работе винта на передний ход) называется входящей (ведущей), а задняя – выходящей. Входящая кромка почти всегда толще выходящей. Естественно, названия кромок не зависят от того, вращается винт на передний, на задний ход или лежит на земле.
Гребные винты, как и обычная резьба, бывают правые и левые (правого и левого вращения). Если смотреть на судно с кормы, то правый винт при работе на передний ход вращается по часовой стрелке, а левый – против часовой стрелки. Если наблюдатель находится на ступице и смотрит на одну из лопастей, то название винта (правый или левый) совпадает с названием дальней от наблюдателя кромки, независимо от того, какой стороной лежит винт на земле. Если к винту, лежащему на земле, подойти со стороны, для определения направления вращения можно использовать «правило ноги» или «правило руки»: направление вращения совпадает с названием ноги или руки, которую удобнее поставить (положить) на лопасть. Проблемы могут возникнуть с винтами многовинтовых судов, поскольку направление вращения винтов разных бортов противоположное. Были случаи, когда после ремонта винты по ошибке меняли местами; при выходе из порта судно неожиданно начинало двигаться задним ходом вместо переднего, что приводило к авариям.
Форма гребных винтов довольно сложна, и две проекции дают весьма неполное представление о ней. Поэтому приходится дополнительно использовать контуры и сечения.
Развернутый контур получается, если винтовую поверхность пересечь несколькими соосными цилиндрами (разных радиусов), полученные винтовые линии развернуть на шаговые углы и соединить концы этих линий плавной кривой. Развернутый контур употребляется в некоторых странах; его недостаток в том, что длины винтовых линий искажаются. Поскольку в России эксплуатируются суда, построенные в различных странах, специалисты-судоремонтники могут встретиться с документацией, где использован развернутый контур лопасти винта. Площадь, ограниченная развернутым контуром, довольно точно соответствует площади нагнетательной поверхности лопасти.
В нашей стране применяют спрямленный контур, который получается из развернутого, если все винтовые линии вытянуть вдоль прямых, перпендикулярных оси лопасти. Этот контур принципиально точен, площадь, ограниченная спрямленным контуром, практически равна площади нагнетательной поверхности лопасти, а центр тяжести этой площади лежит на одном радиусе с центром тяжести нагнетательной поверхности лопасти.
Развернутый или спрямленный контур используется при проектировании формы лопасти гребного винта.
Введем понятие «дисковое отношение гребного винта» АЕ/Ао, где АЕ -площадь (нагнетательных поверхностей) всех лопастей; А0 – площадь диска винта.

Дисковое отношение – одна из важнейших геометрических характеристик винта.
Другая, не менее важная геометрическая характеристика – шаговое отношение P/D, равное отношению шага винта к его диаметру. Под шагом винта подразумевают шаг винтовой поверхности, по которой образована нагнетательная поверхность лопасти. Если эта поверхность аксиально-переменного шага, в качестве шага берется так называемый кромочный шаг, когда поверхность постоянного шага проводится через линию кромок (входящую и выходящую кромки, т.е. средний шаг на длине хорды профиля). У винтов радиально-переменного шага шагом считается шаг винтовой поверхности на относительном радиусе, равном 0,7 R. Дополнительно в виде таблицы или графика указывается распределение шага вдоль лопасти.
5.2. Элементы гребного винта.
Гребные винты фиксированного шага (ВФШ) изготовляют цельными и они состоят из следующих основных элементов:
Ступицы, которая представляет собой втулку, насаживаемую на конус гребного вала;
Лопастей,радиально расположенных на ступице в количестве от 2 -х до 6 -и;
Нижняя часть лопасти, соединяющаяся с втулкой называется корнем лопастей, а верхняя часть – вершиной или концом. Передняя поверхность лопасти, обращенная в сторону корпуса судна имеет выпуклую форму и называется засасывающей, а задняя поверхность лопасти имеет вогнутую или плоскую форму и называется нагнетающей ,а пересечение этих двух плоскостей образуют кромку лопасти. (Рис 5.9.). В зависимости от типа винта применяют сегментные, авиационные и клиновидные сечения лопасти. Сечения лопастей сегментных и авиационных профилей бывают плоско-выпуклыми, двояко-выпуклыми и выпукло-вогнутыми .
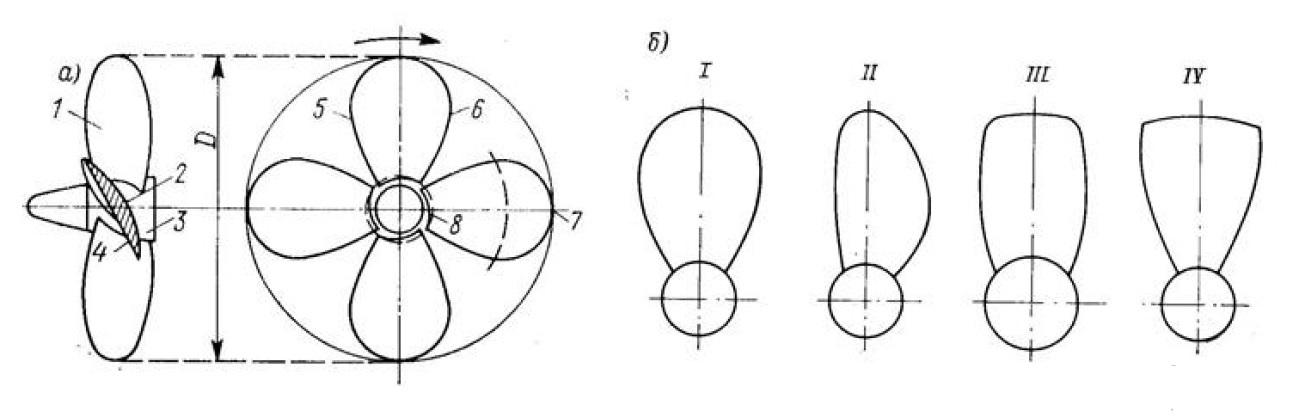
Рис. 5.9. Конструктивные элементы гребного винта (а) и
формы контуров лопастей гребных винтов (б)
/ — лопасть; 2 — засасывающая поверхность; 3 —
ступица; 4 — нагнета тельная поверхность; 5 —
выходящая кромка; 6 — входящая кромка; 7 — край
лопасти; 8 — корень лопасти. / — симметричный;
//— саблевидный; /// — ледокольный; IV —усеченный
При вращении винта поток жидкости на выпуклой засасывающей поверхности лопасти ускоряется , понижая давление (разрежение), а на нагнетающей вогнутой поверхности поток замедляется, создавая повышенное давление . В результате разности давлений создается гидродинамическая сила R, проекция которой на ось гребного винта образует упор винта Р , направленный в сторону движения судна, т.е. против силы сопротивления воды .
При равенстве сил сопротивления и упора винта R =Р – судно движется с постоянной скоростью Vp .
Исследования показали, что около 70 процентов гидродинамической силы создается за счет разрежения на засасывающей стороне лопасти. Эта сила воспринимается лопастями винта, которые через ступицу и гребной вал передают ее судну.
Поскольку лопасти имеют винтообразную поверхность, то при вращении винта вода не только отбрасывается назад, но и закручивается в сторону вращения лопастей. На закручивание потока и преодоление сопротивления вращению винта в воде затрачивается часть мощности, подводимой к винту от ГД, поэтому отношение мощности, затраченной на создание упора винта ко всей мощности, затраченной на его вращение называется к.п.д. винта и колеблется в диапазоне 0,5 ± 0,7. Для мал оборотных винтов он ближе к верхнему пределу.
5.3.Характеристики гребного винта.
При изучении работы гребных винтов используется их геометрические, кинематические и динамические характеристики.
1.Геометрическими характеристиками гребного винта являются:
-диаметр гребного винта — D
-шаг гребного винта –H –это путь, пройденный винтом за 1 оборот в твердой среде;
– шаговое отношение – это отношение шага винта к диаметру H/D
– сумма площади спрямленных лопастей – Az;
– Z –-число лопастей;
– площадь спрямленной лопасти – A;

– дисковое отношение – это отношение суммарной площади спрямленных лопастей к площади диска винта ,

где – площадь диска винта;

-диаметр ступицы –;

-отношение диаметра ступицы к диаметру винта = .
Конструкция и геометрия гребного винта. Гидродинамические характеристики гребного винта
Наибольшее распространение на кораблях и судах всех типов получил гребной винт, поэтому в дальнейшем только его и будем рассматривать.
Винт состоит из ступицы и лопастей, являющихся его рабочими элементами. За счет разницы давлений на засасывающей, обращенной в сторону движения, и нагнетающей, воспринимающей реакцию отброшенных масс воды, поверхностях лопастей создается упор гребного винта.
Лопасть — крылообразное тело, создаваемое двумя винтовыми поверхностями, линия пересечения которых называется контуром.
Как и у крыла, у лопасти различают две кромки — входящую, направленную навстречу потоку, и выходящую — противоположную первой. Граница между ними — край лопасти — самая удаленная от оси точка гребного винта. Участок, примыкающий к ступице, называется корнем лопасти.
Кратко остановимся на винтовых поверхностях, от которых самый распространенный движитель — гребной винт — получил свое название.
Заставим отрезок АВ двигаться таким образом, чтобы один его конец – точка А’-скользил по оси цилиндра, а другой – точка В – по его поверхности, одновременно вращаясь вокруг оси. Образованная таким образом поверхность носит название винтовой (рисунок 17.1).

Рисунок 17.1 Образование винтовой поверхности
Если скорости, поступательная и окружная, будут при этом постоянными, то образуется правильная винтовая поверхность. Точка В на боковой поверхности цилиндра опишет винтовую линию, шагом которой называется расстояние Р, проходимое этой точкой в осевом направлении за один оборот.
Рассекая винтовую поверхность соосными цилиндрами, на каждом из них получим винтовую линию – след движения соответствующей точки отрезка АВ. Следовательно, винтовую поверхность можно определить как совокупность бесконечного множества винтовых линий, описанных точками отрезка АВ. Сам этот отрезок называется образующей винтовой поверхности. Он в общем случае может быть наклонен к оси цилиндра, иметь криволинейную форму.
Разворачивая боковую поверхность цилиндра на плоскость, получим прямоугольник, в котором винтовая линия является диагональю. Нижняя половина этого прямоугольника называется шаговым треугольником: его катеты равны длине окружности и шагу винтовой линии. Если гипотенуза такого треугольника прямолинейная (рисунок 17.2,а), то винтовая линия называется винтовой линией постоянного шага, при этом шаговый угол р =const.
Криволинейная гипотенуза — признак винтовой линии переменного шага ф=f(г) , где г – угол поворота образующей относительно оси цилиндра.

Рисунок 17.2 Шаговый треугольник: а — винтовая линия постоянного шага; б — винтовая линия переменного шага
Правильная винтовая поверхность на всех радиусах в сечении имеет винтовые линии постоянного шага, кроме того соблюдается и условие Р=const. Если же поверхность образована винтовыми линиями постоянного шага, но P = f(r), то это винтовая поверхность радиально-переменного шага. Различают еще винтовую поверхность аксиально-переменного шага — шаговые треугольники имеют криволинейные гипотенузы (фconst), но один и тот же средний шаг Р = const. Если фconst и P = f(r), то такая поверхность называется винтовой поверхностью аксиально-радиально-переменного шага.
Лопасти гребных винтов образуются винтовыми поверхностями всех перечисленных типов. Так, если нагнетающая поверхность лопасти может быть правильной, то засасывающая всегда имеет в сечении винтовую линию переменного шага. Рассекая лопасть гребного винта соосным с ним цилиндром и разворачивая его на плоскость, получаем профиль сечения лопасти, шаг и шаговый угол на данном радиусе (рисунок 17.3).

Рисунок 17.3 Сечение лопасти гребного винта соосным цилиндром
Винтовая поверхность без искажений не разворачивается на плоскость. Наиболее точное представление о форме и площади лопасти дает так называемый спрямленный контур, построение которого осуществляется известными методами графики.
Основные геометрические характеристики гребного винта — число лопастей, диаметр, шаг, диаметр ступицы, форма профиля лопасти, площадь ее спрямленной поверхности. Современные гребные винты имеют диаметр до D=12м, масса такого движителя может достигать 150 т. Число лопастей винтов изменяется в пределах Zp = 28.
Наряду с диаметром гребной винт характеризуют его безразмерные геометрические характеристики. К ним относят:
- — дисковое отношение АЕ/А, где АЕ – площадь спрямленной поверхности всех лопастей; Ао — площадь диска (гидравлического сечения) гребного винта; АЕ/А = 0,21,3 (большие значения относятся к винтам быстроходных судов);
- — шаговое отношение P/D, где Р – шаг; D – диаметр винта, P/D = 0,62,0 (большие значения -винты быстроходных судов);
- — относительный диаметр ступицы dH = 0,160,35 (большие значения характерны для ВРШ и винтов со съемными лопастями).
Если относительно наблюдателя, смотрящего в корму удаляющегося судна, гребной винт вращается по часовой стрелке, то его называют винтом правого вращения, в противном случае– винтом левого вращения.
Гидродинамические характеристики гребного винта. Кинематика гребного винта. В процессе работы гребной винт с частотой n вращается вокруг своей оси и с поступательной скоростью vA перемещается вдоль нее. Путь, проходимый винтом в осевом направлении за один оборот, называется поступью

Разница между шагом гребного винта и его поступью называется скольжением.
Для конкретного гребного винта (Р=const) поступь однозначно определяет скольжение, обе эти величины изменяются в широких пределах, что позволяет винту выполнять функции движителя при всех скоростях движения судна.
Перейдя к безразмерной величине, запишем относительную поступь в виде

Относительная поступь J – важнейшая кинематическая характеристика гребного винта, определяющая режим его работы, а следовательно и силы на нем возникающие.
Кривые действия гребного винта. Работая в качестве движителя, гребной винт создает вызванные осевые скорости. Вращаясь вокруг своей оси, он вовлекает в это движение окружающую жидкость, закручивает поток, т. е. создает еще и вызванные окружные скорости. На это затрачивается дополнительная мощность, что является одной из причин, почему КПД винта меньше, чем у идеального движителя. Кроме того, вызванные окружные скорости изменяют и характер обтекания лопасти.
Если рассечь гребной винт двумя соосными цилиндрами, радиусы которых г и г + dr, то заключенный между ними участок лопасти можно рассматривать как элемент несущего крыла. Результирующая скорость vR обтекания этого элемента – геометрическая сумма четырех скоростей: осевой хА окружной Щr и двух вызванных, тех же наименований wX0 и wИ0. В теории идеального движителя было доказано, что вызванная осевая скорость в диске движителя равна половине таковой на бесконечности. То же соотношение справедливо и для вызванных окружных скоростей, т. е. wИ0 = wИ/2.
Винт закручивает поток в сторону своего вращения, поэтому относительная окружная скорость элемента лопасти составляет (Щr – wИ0), а для результирующей скорости будет справедливым выражение

Рассмотрим обтекание элемента лопасти, протяженностью сСг в обращенном движении, т.е. мысленно остановим винт, а всем скоростям придадим противоположное направление (рисунок 17.4).

Рисунок 17.4 Схема обтекания элемента лопасти гребного винта
Элемент лопасти, обтекается потоком со скоростью хR под углом атаки
где ф -шаговый угол, вi – угол индуктивной поступи, определяемый выражением

Элемент лопасти — элемент несущего крыла, на нем возникают подъемная сила dY и сопротивление dX:


где bdr – площадь элемента в плане; b(r) – хорда крыла.
Назначение гребного винта как движителя создавать упор T — силу, направленную вдоль оси в сторону движения. Для преодоления момента сопротивления вращению Q к винту необходимо подвести мощность
Проектируя элементарные подъемную силу и силу профильного сопротивления на интересующие нас направления (рисунок 17.4), получаем элементарный упор
dT = dY cos вi – dX sin вi = dY cos вi (l -е· tg вi ) (17.10)
и элементарную силу сопротивления вращению
dr = dY sin вi + dX cos вi = dY sin вi (l+-е· ctg вi ) (17.11)
где е = Сх/Су — обратное качество профиля.
Сопоставляя (17.10) и (17.11), убеждаемся, что наличие вязкости жидкости (е>0) приводит к уменьшению полезной силы — упора — и к увеличению момента сопротивления вращению dQ = rdф, т. е. к снижению эффективности гребного винта (его КПД).
Интегрируя (17.10) и (17.11) вдоль всей лопасти, с учетом (17.8) найдем создаваемый гребным винтом упор Т и момент Q, необходимый для его вращения:

где Zр – число лопастей; гн, Р. – радиусы ступицы и винта соответственно. Приведем подынтегральные выражения к безразмерному виду



где -относительный радиус; – безразмерная ширина лопасти

Анализ выражений (17.13) позволяет сделать вывод, что силы, возникающие на гребном винте, являются сложными функциями его размеров и формы контура лопастей формы профиля (Су) сечения лопасти, его угла атаки [вi,ц- см. (17.6)], относительной поступи – и вызванных скоростей–(17.4), (17.7).
Назвав безразмерные интегралы в (17.13) коэффициентами упора Кт и момента КQ соответственно, запишем

Эффективность работы гребного винта, как любого преобразователя энергии, определяется его КПД — отношением полезной ТvA и затраченной QЩ мощностей:

и зависит не только от сил, действующих на винте (Кт, КQ, но и режима его работы J.
Для анализа потерь энергии, сопровождающих работу гребного винта, запишем КПД элемента лопасти

где зrx– осевой; зrИ – окружной и згс — конструктивный КПД элемента
Как следует из (17.16), каждый из коэффициентов учитывает определенный вид потерь: зrx – на создание вызванных осевых, зrИ – вызванных окружных скоростей, згс -вязкостные потери.
Произведение первых двух коэффициентов характеризует потери энергии на создание вызванных (индуцированных) скоростей и называется индуктивным КПД элемента:
Для гребного винта в целом имеют место дополнительные потери, не фигурирующие в (17.16). Это, во-первых, концевые потери, возникающие за счет перетекания жидкости у края лопасти– аналог индуктивных потерь у крыла конечного удлинения, во-вторых, КПД винта снижает ступица, которая не создает упора, но потребляет мощность на преодоление сопротивления вращению. Тем не менее выражение (17.17) может быть распространено на винт в целом. При этом потери энергии на ступицу относят к конструктивным, а на концевые вихри — к индуктивным.
Силы, создаваемые гребным винтом, определяются режимом работы, т. е. его поступью. Зависимости упора и момента от поступи (рисунок 17.6) принято называть кривыми действия гребного винта. Углы атаки элементов лопасти имеют максимальные значения при отсутствии осевой скорости (см. рисунок 17.5), т. е. в так называемом швартовном режиме, когда hа = 0. При этом достигают максимума и значения упора и момента. С ростом скорости vа увеличивается hа и уменьшается угол атаки; соответственно снижаются и действующие на лопасть силы.
Поступь Р1, при которой упор обращается в нуль, называется гидродинамическим шагом гребного винта или поступью (шагом) нулевого упора. В случае, когда Q =0, имеет место поступь (шаг) нулевого момента Р2. Разница между ними m=Р2 -Р1 – параль в определенной степени — характеризует эффективность движителя; чем меньше параль, тем совершеннее гребной винт. В идеальной жидкости теоретически m=0. Как правило, имеет место соотношение Р < Р1 т. е. при равенстве поступи геометрическому шагу винта hа = Р упор Т > 0. Это объясняется тем, что за счет конечной стрелки пробига ус, угол нулевой подъемной силы бо> 0 (см. рисунок 16.7).
В диапазоне поступей 0 < hA < P1 винт создает упор (Т > 0) и для своего вращения требует затраты мощности (Q > 0, PD = QЩ > 0), т. е. выполняет функции движителя. При hA>Р2 и упор и момент отрицательны — гребной винт, вращаемый набегающим потоком, создает сопротивление движению, однако с него, как с турбины, можно снимать энергию. Соответственно, этот режим работы винта называют турбинным.
В случае, когда P1< hA< Р2 говорят, что винт парализован: для его вращения надо подвести энергию, а упор он создает при этом отрицательный. Расчетный режим работы гребного винта — в диапазоне поступей 0 < hA < P1. В процессе эксплуатации могут, однако, иметь место и режимы, когда hA > P1 — при реверсе судна, при его буксировке, при движении под парусами с неработающим двигателем, для многовальной установки, когда работает только часть гребных винтов.
Кривые действия (рисунок 17.5) характеризуют работу конкретного гребного винта (D, P, Zp и др.) при конкретной (hA=const) частоте вращения. Изменение последней приведет к изменению Т и Q при hA = const. Такая неоднозначность, а кроме того, и зависимость динамических характеристик гребного винта от размеров существенно затрудняют использование кривых действия в приведенном выше виде.

Рисунок 17.5 Кривые действия гребного винта

Рисунок 17.6 ГДХ гребного винта
Представив упор и момент в безразмерном виде с помощью зависимостей (17.14) и в функции от относительной поступи, получим гидродинамические характеристики (ГДХ) гребного винта (рисунок 17.6). Сюда же обычно наносят и зависимость зо(J) – КПД обращается в нуль при J = 0 и J=Р1/D [см. (17.15)]: в первом случае отсутствует скорость (vA=0), во втором упор (Т = 0).
В соответствии с известной из высшей математики теоремой Ролля между этими двумя точками имеет место экстремум — максимальное значение КПД. Проектируя гребной винт, стремятся, чтобы он работал именно в этой области. Представленные в безразмерном виде ГДХ одинаковы для всех геометрически подобных гребных винтов. Режим работы — относительная поступь — однозначно определяет коэффициенты упора и момента, а вместе с ними и КПД. Независимыми на рисунке 17.6 являются только Кт и КQ, з определяется с помощью (17.15).
Элементы геометрии гребного винта
Основными геометрическими характеристиками винта являются:
– диаметр винта D – диаметр окружности, описываемой наиболее удалёнными от оси точками лопастей: у крупнотоннажных судов диаметр доходит до 10м;
– диаметр ступицы винта d- (обычно у монолитных винтов d= 0’2D);
– шаг винта Н- расстояние, которое прошёл бы винт за один оборот в твердой среде;
– шаговое отношение – отношение шага винта к его диаметру, для судовых винтов

площадь диска винта – площадь ометаемая винтом при его вращении:

площадь лопастей винта А- суммарная площадь спрямлённой (развернутой на плоскости) поверхности всех лопастей винта;
дисковое отношение – отношение площади лопастей к площади диска винта

= 0,3 ?1,2 (большое значение у быстроходных судов);
количество лопастей z- может быть от двух до двенадцати; чем больше лопастей, тем лучше уравновешен винт;
профиль сечения может быть сегментным ( как правило, у буксиров и ледоколов), авиационным ( у транспортных судов) и специальным, похожим на вытянутый криволинейный треугольник – у скоростных судов для предотвращения кавитации.
Кинематические и гидродинамические характеристики гребного винта
Во время работы гребной винт участвует одновременно в двух движенях: вращается вокруг своей оси и перемещается поступательно вместе с судном вдоль своей оси. Расстояние, которое пройдет винт в водной среде за один оборот называется абсолютной поступью винта h
где: h- измеряется в метрах;
– осевая скорость перемещения винта, м/с;
n- частота вращения винта, с.
Отношение абсолютной поступи к диаметру винта называется относительной поступью винта ;

Разность между геометрическим шагом винта Н и его абсолютной называется абсолютным скольжением S;

Отношение абсолютного скольжения к шагу винта называется относительным скольжением винта s;


Скольжение и поступь винта являются характеристиками режима работы гребного винта. При работе винта на месте (швартовых) поступь винта равна
А скольжения s=1. С началом движения судна поступь увеличивается, а скольжение до определённых пределов при полной скорости судна для данной частоты вращения винта.
Винт при своём вращении движется поступательно. Для простоты рассмотрим план скоростей для элемента лопасти, вырезанного низ неё на радиусе двумя коническими сечениями, близкими друг к другу.
Скорость вращательного движения элементов лопасти =2prn, а поступательного =nh, причём направление противоположно направлению движения элемента лопасти винта.
Рассмотрим силы, действующие на элемент лопасти, как на элемент крыла. Силу, действующую на элемент лопасти. Можно разложить на подъёмную силу ??Y и силу лобового сопративления ??X, причём ??Y перпендикулярна к скорости ?, которая является результирующей скоростей и , сила ??X параллельна ей.
Каждую из этих сил можно разложить на составляющие, параллельные поступательному движению элемента и перпендикулярные к нему. Подъёмная сила ??Y раскладывается на составляющие ?? и . а если сила лобового сопротивления ??Х на ?? и .
Разность составляющих . – это упор, создаваемым элементом винта:

Сумма составляющих ?? и даёт касательную силу, препятствующую вращению элемента лопасти:

Произведение силы ??Т на радиус r, по которому вырезан элемент, даёт момент, противодействующий вращению винта.
Суммируя силы упора и моменты, создаваемые каждым элементом, для всех лопастей винта, получим упор Р = и момент М = для всего гребного винта.
Упор Р = и есть сила, движущая судно, т.е. сила преодолевающая сопротивление воды и характеризующая полезную работу, совершаемую винтом.
Момент М характеризует усилие, которое должен развивать главный двигатель, чтобы вращать винт с требуемой частотой вращения.
Основной задачей при длительной работе судна является согласование характеристик элементов комплекса гребной винт – корпус судна – двигатель.
Любой двигатель может нормально работать только при соблюдении ряда условий. Для получения наибольшей скорости судна или наибольшего упора при наименьшем расходе топлива необходимо полное соответствие гребного не только основному режиму эксплуатации, но и характеристикам главного двигателя. Винт должен обеспечивать работу двигателя с номинальной мощностью и заданной частотой вращения, сохраняя при этом свой наивысший КПД. Зависимость потребляемой гребным винтом мощности от частоты вращения при постоянном буксировочном сопротивлении называют винтовой характеристикой.
Винтов соответствующих двигателю, может быть бесчисленное множество. Они отличаются от всех прочих винтов только тем, что позволяют полностью потреблять передаваемую двигателем номинальную мощность при нормальной частоте вращения, используя её с большим или меньшим эффектом. Совокупность согласованных между собой характеристик корпуса, двигателя и движителя, построенных в зависимости от скорости судна, называют паспортной диаграммой и ходовыми характеристиками.
Геометрические характеристики гребного винта
Рабочими органами винта являются лопасти, расположенные радиально на равных угловых расстояниях друг от друга и укрепленные на ступице, насаживаемой на конец гребного вала. Обычно число лопастей z = 3 6.
Различают винты правого и левого вращения. Винты правого вращения при повороте по часовой стрелке перемещаются в аксиальном направлении от наблюдателя, левого вращения – на наблюдателя. На двухвальных судах на валопроводе правого борта устанавливается винт правого вращения, на валопроводе левого борта – левого вращения. При вращении бортовых винтов в наружную сторону меньше вероятность попадания плавающих предметов между винтом и корпусом, и опасность подсасывания судна к стенке.
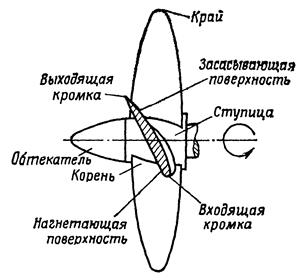
Рис.105.Элементы гребного винта
Поверхность лопасти винта, обращенная в корму и воспринимающая при переднем ходе судна повышенное давление, называется нагнетающей (рис.105). Поверхность лопасти, обращенная в нос и воспринимающая при переднем ходе судна пониженное давление, называется засасывающей. Линия пересечения нагнетающей и засасывающей поверхностей образует кромки лопасти. Кромка лопасти, обращенная в сторону вращения винта, – входящая, а противоположная – выходящая. Свободный конец лопасти называется краем, а примыкающий к ступице – корнем.
Диаметр окружности, описываемой краями лопастей, носит название диаметра D винта (радиус винта R = D/2). Площадь круга Аd = πD 2 /4 принято называть площадью диска винта. Диаметр ступицы d (радиус ступицы r), у цельнолитых d = (0,16 0,18) D, у винтов со съемными лопастями d 0,25 D, винты регулируемого шага имеют d 0,32 D.
 |
Нагнетающая и засасывающая поверхности лопасти представляют собой части винтовых поверхностей. Винтовая поверхность образуется при одновременном поступательном перемещении какого-либо отрезка (образующей) вдоль некоторой оси и вращении его вокруг той же оси (рис.106). Винтовая поверхность имеет двоякую кривизну, и поэтому ее изображают на плоскости системой развернутых винтовых линий для различных значений радиуса. Каждая винтовая линия является траекторией соответствующей точки образующей. Осевое перемещение этой точки за один оборот образующей называется шагом винтовой линии Нi.
Рис. 106. Образование винтовой поверхности постоянного шага
Если поступательное и вращательное перемещения образующей равномерны, получается правильная винтовая поверхность постоянного шага (рис.106); для нее на любом радиусе Нi = 2π r i tgφ = const, где φ – шаговый угол. Если движение образующей остается равномерным, но шаг винтовых линий на разных радиусах r i имеет различные значения Нi, образуется винтовая поверхность радиально-переменного шага (рис 107,а). Шаг такой поверхности в целом принято характеризовать значением Н на радиусе на 0,7R.
Рис.107. Винтовые поверхности переменного шага:
а – радиально-переменного шага; б – осе-переменного шага;
в – осе-радиально- переменного шага
При неравномерном перемещении образующей винтовая поверхность будет осе-переменного шага (рис.107,б). Если шаг винтовых линий изменяется как вдоль оси, так и по радиусу, получается винтовая поверхность осе-радиально-переменного шага (рис.107,в).
Шаг правильной винтовой линии, проходящей через кромки лопасти на данном радиусе, называется геометрическим шагом лопасти (винта) Н на этом радиусе. Иначе он называется кромочным или конструктивным шагом. Отношение Н/D называется конструктивным шаговым отношением винта; оно изменяется в пределах 0,6 1,8.
Профили сечений лопастей винтов бывают, как правило, двух видов – сегментные и авиационные (рис.108). У сегментных профилей наибольшая толщина приходится на середину хорды профиля, у авиационных она смещена к передней кромке в район трети хорды профиля. Сегментные и авиационные профили могут быть плосковыпуклыми, двояковыпуклыми и выпукло-вогнутыми. Форма спрям-
ленной поверхности (форма контура лопасти) может быть симметричной или саблевидной (рис.109). Суммарная площадь спрямленных поверхностей обозначается Fс. Отношение площади спрямленной поверхности всех лопастей к площади диска винта называется дисковым отношением гребного винта, т.е. Θ = Fс/ Аd = Fс/ (πD 2 /4) (у винтов промысловых судов Θ = 0,30 0,70).
Определение основных геометрических элементов лопасти гребного винта
Расчеты и чертежи в любительском судостроении.
Приближенный расчет гребного винта. Часть1.
Принцип работы гребного винта. На пластине с одной поверхностью выпуклой, а другой плоской, движущейся в воде (смотри рисунок), на выпуклой поверхности возникает разрежение, а на плоской — повышенное давление.
Разрежение и давление, возникающее при движении пластины.
Гребной винт представляет собой втулку (ступицу), На которой укреплены 2, 3, 4, а иногда 5 и 6 отрезков таких пластин, называемых лопастями. Когда надетая на гребной вал ступица с лопастями вращается, в воде, то на каждой лопасти возникает разрежение и давление, результирующая которых направлена перпендикулярно к лепасти (рисунок ниже).
Разложение силы, возникающей при вращении лопасти гребного винта.
Эту результирующую можно разложить на две взаимно-перпендикулярные силы: Т и Q , Сила Т является силой, преодолевающей сопротивление воды движущемуся судну, она называется упором гребного винта. Сила Q — сила, затрачиваемая на преодоление сопротивления воды, вращению лопасти. Сила Т — полезная, а Q — бесполезная.
Работу гребного винта можно представить себе и следующим образом. Разрежение на выпуклой поверхности лопасти заставляет воду двигаться к винту, а давление на плоской поверхности отбрасывает воду за корму. Реакция отбрасываемой струи передается через лопасти ступице, гребному валу, упорному подшипнику и корпусу судна. Движение частиц воды в отбрасываемой струе винтообразное и, следовательно, состоит из поступательного и окружного движения.
Винтообразно закрученная струя, отбрасываемая гребным винтом.
Чем больше поступательная скорость частиц по сравнению с окружной, тем большая доля энергии затрачивается полезно и тем меньшая бесполезно, или, иначе, тем ‘больше коэффициент полезного действия винта.
Каждая точка лопасти, вращаясь вокруг оси ступицы к одновременно прямолинейно перемещаясь с судном, описывает винтообразную линию; следовательно, если изобразить движение всех точек за некоторый промежуток времени или, иначе, продолжить лопасть и ступицу, то получим винтовую поверхность, подобную той, которая изображена на рисунке.
Лопасть гребного винта представляет собой отрезок винтовой поверхности.
Если бы лопасть (или весь гребной винт) вращалась в соответствующей жесткой гайке, то за один свой оборот она продвинулась бы прямолинейно на путь, равный геометрическому шагу. Но, ввинчиваясь в тайку, винт должен опираться на винтообразную поверхность гайки, а так как вода очень податливая среда и отступает при малейшем давлении на нее, то фактически за один свой оборот гребной винт, работая на судне, проходит расстояние по отношению к потоку меньшее, чем геометрический шаг. Это расстояние носит название поступи винта.
Обозначим через H геометрический шаг, а через h поступь винта, тогда величина
будет называться относительным скольжением. У гребных винтов, работающих на быстроходных судах (у таких винтов на каждый квадратный сантиметр площади лопастей приходится сравнительно небольшой упор), относительное скольжение имеет меньшее значение, чем у винтов тихоходных судов (у таких винтов удельный упор сравнительно большой).
Подбор элементов гребного винта.
Подобрать к судну хороший гребной винт — это значит найти такие главные элементы гребного винта, при которых винт:
1) на наибольшей заданной скорости хода судна будет развивать упор, равный сопротивлению судна, и
2) будет требовать для этого точно такой скорости вращения (числа оборотов в минуту) и мощности, которые может создавать двигатель на заданном рабочем режиме. Задача эта так же важна и сложна, как и подбор хороших обводов корпуса.
Очень часто подбор винта приходится производить два-три раза, прежде чем’будет найден хороший вариант.
Приступая к подбору гребното винта, необходимо располагать, помимо теоретического чертежа судна:
1) внешней характеристикой двигателя, или, иначе, диаграммой, показывающей как изменяется мощность данного двигателя от изменения числа оборотов,
2) схемой силовой передачи от двигателя к винту и
3) кривой сопротивления будущего судна.
Если внешней характеристики нет, то надо знать по крайней мере наибольшее возможное число оборотов двигателя и наибольшую развиваемую при этих оборотах мощность; если двигатель не новый, то надо знать и степень его изношенности, чтобы можно было точнее оценить фактически развиваемую им мощность. На рисунке приведен пример внешней характеристики мотора.
Примерная диаграмма внешней характеристики бензинового двигателя.
Если сопротивление судна не вычислено, то надо по крайней мере определить по приближенным формулам наибольшую возможную скорость хода и сличить ее для проверки со скоростью известных подобных судов.
Основными элементами гребного винта будем считать его диаметр и геометрический шаг, а также число лопастей, наибольшие ширину и длину лопасти.
Для подбора элементов гребного винта малого судна существует несколько способов; более точные и при этом более сложные способы — это те, что применяют для подбора винтов крупных судов. Они основаны и а результатах многочисленных последовательных испытаний моделей гребных винтов, при которых измерялись упор, потребная мощность и число оборотов, либо на сложных теоретических расчетах. Менее точные способы основаны на статистических данных о винтах построенных судов. Ниже мы опишем только способ подбора трехлопастного гребного винта, приведенный в книге Л. Л. Романенко и Л. С. Щербакова «Моторная лодка». Этот способ более прост, чем точные способы подбора винта, точность же его достаточна для удовлетворения потребностей любителя. Во всяком случае, при проектировании обычных судов этот способ предохраняет от серьезных просчетов.
* Упрощенный метод расчета гребных винтов спортивных мотосудов изложен также в книге «Водно-моторный спорт» (подготовка спортсменов-разрядников). «Физкультура и спорт», 1959.— Прим, ред.
Прежде чем приступить непосредственно к определению подходящих элементов (гребного винта, необходимо вычислить некоторые весьма важные величины.
1) Прежде всего надо вычислить величину мощности, которую сможем затрачивать непосредственно на вращение винта, или, иначе, мощности на винте N также число оборотов, которые сможем сообщать винту. Если двигатель .’Специально судовой, то в качестве наибольшей мощности на коленчатом валу двигателя можно принимать-мощность но внешней характеристике илк мощность, указанную в паспорте; если же наш двигатель не судовой, а, например, автомобильный и нам придется его конвертировать, т. е. приспосабливать к условиям работы на судне, то следует рассчитывать на то что фактически с вала мотора мы сможем снимать на 12—15% (в зависимости от качества конверсии и состояния мотора) меньше. Иначе, коэффициент полезного действия конверсии кон =0,88—0,85. Заметим, что для подвесных моторов в паспорте указывают мощность на винте.
Если вал двигателя будет соединен с гребным винтом непосредственно (на прямую) без реверсивно разобщительного устройства, то «по дороге» к винту мы потеряем 3—4% мощности на валу; иначе говоря, коэффициент полезного действия такого валопровода вал=0,97—0,96 в зависимости от качества выполнения передачи (точности установки подшипников и т. п.). При установке реверсивно-разобщительного устройства следует рассчитывать на вал= 0,96—0,95.
Наконец, если подбор гребного винта покажет, что нри числе оборотов двигателя, соответствующем наибольшей мощности, нельзя подобрать винт, который сообщал бы судну расчетную скорость, то придется по пути от мотора к винту установить редуктор- или мультипликатор, соответственно уменьшающий или увеличивающий число оборотов винта. В этом случае следует принимать вал= 0,94—0,93 опять-таки в зависимости от качества изготовления и состояния зубчатой передачи.
Таким образом, если мы намереваемся установить на судне, например, автомобильный мотор мощностью на валу 42 л. с., а также реверсивно-разобщительный и механизм и редуктор, то при подборе элементов гребного винта должны принимать на винте мощность около
Уменьшая мощность при конверсии и расходуя ее на трение при вращении гребного вяла, реверсивно-разобщительного механизма и редуктора, двигатель одновременно уменьшает и число оборотов своего коленчатого вала; поэтому, определив мощность, которую двигатель сможет передавать гребному винту, надо определить и соответствующее ей число оборотов двигателя. В случае же установки редуктора или мультипликатора надо учесть и их передаточное число.
2) Другой важной величиной, которую необходимо определить, является скорость, с которой винт будет поступательно двигаться на расчетной скорости судна. По отношению к непюдвиж’ньш предметам винт движется с той же скоростью v км/час, что и судно. Но так как корпус судна и подводные выступающие части, расположенные впереди и над гребным винтом, увлекают (подтягивают) за собой массу воды, в которой должен работать винт, то оказывается, что винт движется не в неподвижной воде, а в воде, частицы которой движутся вперед с некоторой скоростью, меньшей, чем скорость v судна и винта. Следовательно, скорость винта по отношению к частицам воды меньше скорости v судна. Поток воды, который увлекается судном, носит название попутного потока; скорость его зависит от обводов, осадки и скорости движения оудна и определяется коэффициентом попутного потока w .
Номограмма для определения скорости движения винта по отношению к потоку воды за судном.
С помощью номограммы на рисунке можно легко определить скорость поступательного движения винта vр м/сек по отношению к воде для различных судов в зависимости от коэффициента попутного лотока w
3) После того как мощность на ,винте Nв , соответствующее ей ,число оборотов винта в минуту n и скорость движения винта по отношению к воде vр определены, надо вычислить вспомогательную величину, называемую индексом мощности:
n —число оборотов 1винта в минуту;
Nв —мощность на винте, л. с.;
vр —скорость винта по отношению -к воде, км/час.
Индекс мощности может быть определен при помощи номограммы. Определив эти три величины, можем приступить непосредственно к определению элементов винта.
Диаграмма для определения шагового отношения, коэффициента полезного действия винта, скольжения к коэффициента К
1. По диаграмме определяем четыре величины:
а) наиболее подходящее отношение шага к диаметру винта H/D ;
б) соответствующий наибольший возможный коэффициент полезного действия винта в;
в) величину скольжения винта S ;
которое нам потребуется при определении диаметра винта D .
2. Зная эти величины, можем, пользуясь выражением
где vр — в м/сек или номограммой, определить наибольший диаметр гребного винта в метрах.
3. Затем, зная величину диаметра D и отношение шага винта к диаметру H/D , определяем шаг винта:
4. Для тото чтобы определить упор гребного винта в кг, пользуемся формулой
или номограммой. Очевидно, что ели величина Р окажется существенно меньше сопротивления на заданной скорости хода судна
то винт не обеспечит этой скорости и расчет следует повторить, задавшись несколько меньшей скоростью хода v ; если /же упор винта окажется достаточным, то следует перейти к расчету размеров лопасти.
Спрямленная площадь всех лопастей, иначе, площадь разогнутых лопастей, должна быть равна (в м 2 ):
Р — упор винта, кг;
Рмах — наибольшее допускаемое для прочности винта давление в кг/м 2 при выбранном материале, Величина Рмах может быть взята из таблицы.
Наибольшее допустимое удельное давление на лопасть.
| Материал | Число лопастей | ||
| две | три | четыре | |
| Алюминиевые сплавы | 3 700 кг/м 2 | 3 000 кг/м 2 | 2 600 кг/м 2 |
| Бронза | 4 400 кг/м 2 | 3 600 кг/м 2 | 3 100 кг/м 2 |
| Сталь | 7 800 кг/м 2 | 6 400 кг/м 2 | 5 000 кг/м 2 |
| Специальная латунь | 15 000 кг/м 2 | 12 000 кг/м 2 | 10 000 кг/м 2 |
Читать далее: Расчет гребного винта. Приближенный расчет гребного винта часть 2.
Гребной винт маломерных судов
Гребной винт – устройство, преобразующее вращение вала двигателя в упор – силу, толкающую судно вперед. Он состоит из ступицы и нескольких (две и более) лопастей. Лопасть судового гребного винта представляет собой гидродинамический профиль, работающие под определенным углом наклона к водному потоку, отбрасывая его и создавая таким образом упор. Лопасть име входящую и выходящую кромки и рабочую (нагнетающую) поверхность. Физическая суть работ гребного винта достаточно проста – при вращении на поверхности его лопастей, обращенный сторону движения судна образуется разрежение, а обращенных назад – повышенное давлен воды. Разность давлений создает силу, одна из составляющих которой и двигает судно вперед.
Упор в большой степени зависит от угла атаки профиля лопасти. Оптимальное значение этого угла для быстроходных катеров 4 – 8°. Основные понятия при рассмотрении темы и характеристик гребного винта :
Шаг гребного винта – геометрическое перемещение (расстояние) любой точки лопасти вдоль оси за один полный оборот гребного винта при условии, что он совершает его в условно твердой среде.
Диаметр винта – диаметр окружности в которую вписаны спрямленные лопасти гребного винта ( рис. 124 ).
Рис. 124 . Шаг, диаметр гребного винта: 1 – один оборот; 2 – номинальный шаг; 3 — диаметр.
Шаговое отношение – отношение шага винта к диаметру.
Дисковое отношение – отношение площади спрямленных лопастей (без ступицы) к площади диска, диаметр которого равен диаметру гребного винта ( рис.126 ).
Рис. 126. Гребные винты с разным дисковым отношением q: а-Ө = 0,3; б — Ө = 0,4; в — Ө = 0,5; г-Ө = 0,6.
Шаговое и дисковое отношения являются основными параметрами гидродинамических характеристик гребного винта, от которых зависит степень использования мощности двигателя и достижение максимально возможной скорости судном. Каждому гребному винту конкретного размера и фиксированного шага присуща своя винтовая характеристика. В принципе, для каждого корпуса судна и двигателя должен подбираться свой оптимальный гребной винт. Процесс расчета гребного винте сложен и базируется на использовании существующих графиков и диаграмм определения диаметра и шага винта в зависимости от мощности на валу. Для малых нагрузок и больших скоростей обычно выбирается двухлопастной гребной винт, для нормальных нагрузок (на катерах) – трехлопастной, для больших нагрузок и малых скоростей — четырехлопастной.
Применение пятилопастного гребного винта значительно уменьшает вибрацию. Скольжение винта – явление, возникающее при работе гребного винта в водной среде под нагрузкой, представляет собой разность между расчетным шагом винта и фактически пройденным расстоянием за один оборот. Скольжение почти никогда не бывает менее 15% шага винта, в большинстве случаев равно 30%, иногда – около 45-50% шага винта. Коэффициент полезного действия (КПД) винта – отношение полезно используемой мощности к затраченной мощности двигателя, зависит, в основном, от диаметра и частоты вращения винта. КПД является оценкой эффективности работы гребного винта, его максимальная величина может достигать 70-80%, на малых судах 45-50%. Знать КПД винта необходимо для производства расчетов проектируемой скорости судна. КПД гребных винтов рассчитывается также по многочисленным графикам и диаграммам, основой которых служит коэффици мощности (коэффициент нагрузки) – отношение произведения мощности двигателя, отдани винту, на частоту его вращения к поступательной скорости винта в попутном потоке. Большинство гребных винтов работает с коэффициентами нагрузки в пределах от 1 до 10. Структура коэффициента нагрузки показывает, что к высокому КПД гребного винта приводят небольшая мои ность двигателя, низкая частота вращения и высокая скорость. Направление вращения гребни винта ( рис. 125 ) в судовождении (правое – по часовой стрелке, левое – против часовой стрел» устанавливают глядя с кормы в нос при работе винта на передний ход и определяют только да переднего хода.
Рис. 125. Гребные винты правого и левого вращения
Кавитация – явление “вскипания” воды и образования пузырьков пара на заа сывающей стороне лопасти винта. При разрушении пузырьков создаются огромные местные да; ления, что является причиной выкрашивания лопасти. При длительной работе эти разрушены достигают больших величин, сказывающихся отрицательно на работе винта. Вторая стадия га тации – возникновение на лопасти сплошной каверны, которая иногда может замыкаться даже) ее пределами. Развиваемый винтом упор падает из-за резкого увеличения лобового сопротивл ния и искажения формы лопастей. При изменении шага и диаметра винта больше или мены оптимальных значений возникают моменты, когда двигатель или не в состоянии вращать винт большей частотой оборотов (не развивает номинальной мощности), либо, наоборот, не только развивает, но и легко превышает значение номинальной частоты вращения коленвала, a поскольку упор винта мал – судно все равно не развивает большой скорости. В этом случае вступают в силу понятия легкий (тяжелый) винт, которые также относятся к числу винтовых характеристик, о которых было сказано выше.
Гребные винты изготавливают из бронзы, латуни, нержавеющей и углеродистой сталей, чугуна. Для гребных винтов малых судов применяют пластмассу. Металлические винты делают литыми с последующей доводкой (обработкой). Задача учета меняющегося сопротивления корпуса судна при изменении его нагрузки и более эффективного использования двигателя в этих условиях достаточно успешно решается применением гребного винта изменяемого шага (винт “мультипитч”, не путать с винтом регулируемого шага – ВРШ). Ступица винта – металлическая, взаимозаменяемые лопасти – из полиащ ных смол (последнее время из них изготовлена и ступица винта). Лопасти имеют жестко закрепленные пальцы ( рис. 127 ), которые проходят в отверстия в торце носовой части ступицы 6 входят в пазы поводка 4, имеющего мерную шкалу. При повороте любой лопасти вокруг ее а происходит синхронный разворот всех лопастей в сторону увеличения (уменьшения) шага винт Закрепление лопастей в выбранном положении осуществляется гайкой 3. Втулка 5 имеет вну ренний диаметр, равный диаметру гребного вала мотора. От осевого перемещения во втул винт фиксируется гайкой 3 и стопорным винтом 8. Операция смены шага занимает при навыке 5 мин и не требует подхода к берегу и снятия винта.
Рис. 127. Устройство гребного винта – мультипитча: 1 – лопасть; 2 – палец; 3 – стопорная гайка; 4 – поводок; 5 – втулка; 6 – носовая часть ступицы; 7 – кормовая часть ступицы; 8 – стопорный винт; 9 – шайба пружинная; 10 – штифт; 11 – обтекатель ступицы.
Гребные винты регулируемого шага отличаются сложностью устройства, массивной ступицей и большой стоимостью, поскольку разворот лопастей для изменения шага винта у них производится дистанционно, в процессе работы (вращения). Преимущества ВРШ: возможность использования полной мощности двигателя на различных режимах движения судна и получения всего диапазона скоростей без изменения направления и частоты вращения гребного вала; экономия горючего и увеличение моторесурса двигателя. Недостатки ВРШ: сложность конструкции, снижение КПД двигателя из-за увеличенного размера ступицы и искажения профиля лопастей при их развороте на промежуточных режимах работы, низкая эффективность на заднем ходу. Для повышения КПД гребного винта на тяжелых водоизмещающих судах достаточно часто применяется кольцевая профилированная насадка ( рис. 128 ), представляющая из себя замкнутое кольцо с плоско-выпуклым профилем.. Площадь входного сечения насадки больше площади выходного, винт устанавливается в наиболее узком месте и с минимальным (0,01 D винта) зазором между краем лопасти и внутренней поверхностью насадки. При работе винта засасываемый поток увеличивает скорость из-за уменьшения проходного сечения насадки, вследствие чего уменьшается скольжение винта. Дополнительный упор создается и на самой насадке (из-за обтекания водой подобно крылу).





